科技日報記者 張夢然
美國普林斯頓大學團隊開發出一種創新材料。它能擴展、變形、移動,并像遙控機器人一樣根據電磁指令執行任務。這種材料沒有傳統的馬達或內部齒輪,卻能改變形狀和移動。在最新一期《自然》雜志上發表的文章中,團隊描述了如何借鑒折紙藝術,創造出了這種模糊了機器人與材料之間界限的結構。
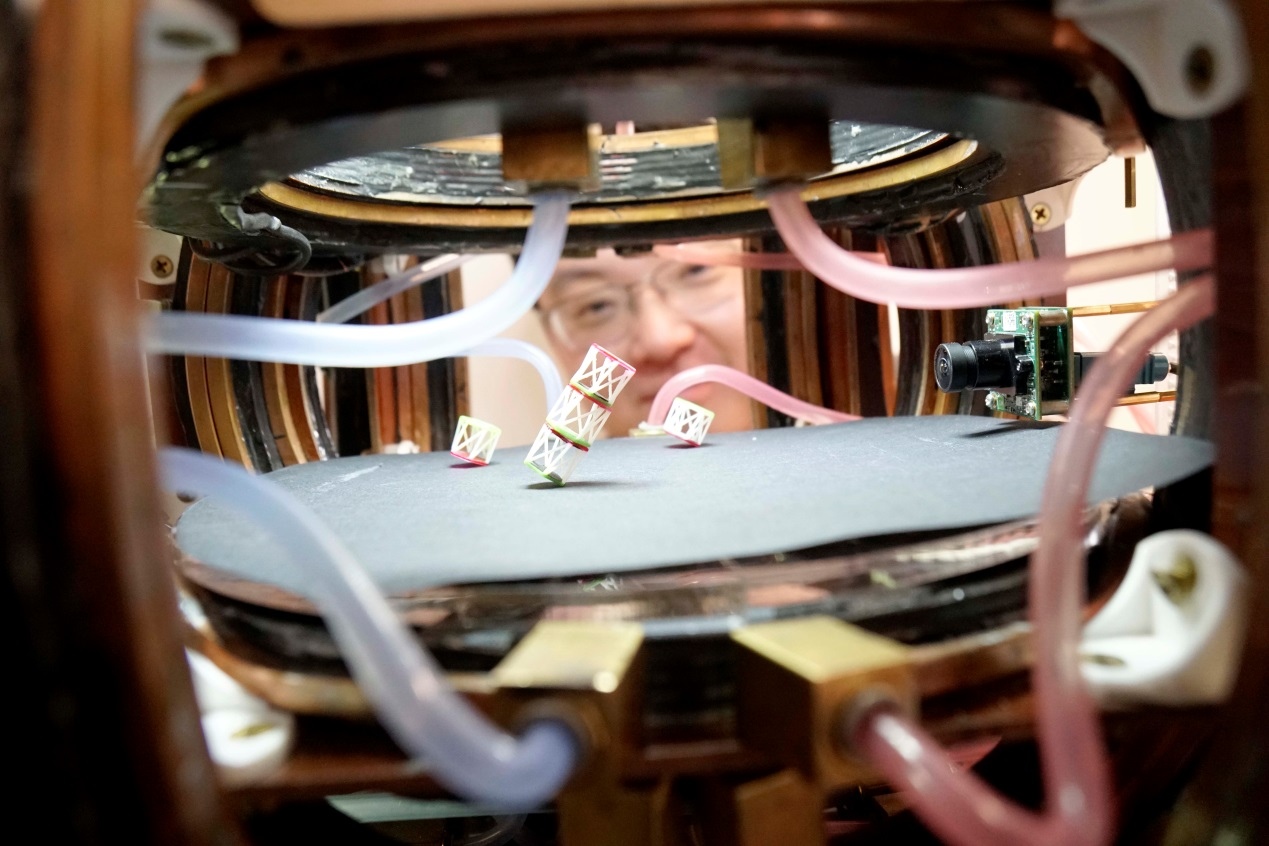
這種創新材料是一種超材料,其特性由物理結構決定,而非化學成分。通過使用簡單的塑料和定制的磁性復合材料,團隊構建了一個可以遠程操控的模塊化組合體——“元機器人”(Metabot)。利用磁場,他們可改變超材料的結構,使其膨脹、移動和變形,所有操作均無需接觸材料本身。
該超材料由許多互為鏡像的可重構單元組成,這些單元之間的手性關系使得復雜的運動成為可能。只需輕微的電磁刺激,就能促使Metabot進行大幅度的扭轉、收縮等動作。這項技術有望推動柔性機器人、航空航天工程、能量吸收及體溫調節等多個領域取得進步。
另外一個潛在應用是醫療領域。比如未來可以通過類似的機器人將藥物精確輸送到身體特定部位,或者輔助外科手術修復受損組織。
團隊還展示了這種材料作為溫度調節器的能力。在實驗中,他們成功地將表面溫度從27攝氏度調整到70攝氏度,然后再調回。
這種新材料的關鍵在于其幾何設計。團隊制作了具有特定排列支撐支柱的塑料管,當壓縮時它會扭曲,而扭曲時它又會被壓縮。這種設計基于折紙中的克雷斯林圖案。通過連接兩個鏡像的克雷斯林管,團隊創建了基礎構建塊,并使每個部分都能獨立響應精確設計的磁場。
由于手性帶來的不對稱行為,這種材料能夠表現出類似于物理系統中的滯后現象,即系統的反應依賴于其內部狀態的歷史變化。這一特性對于模擬難以用數學建模的復雜系統非常有用。長遠來看,這種超材料甚至可能被用來設計模仿計算機晶體管邏輯門的物理結構。
總編輯圈點
這種材料挑戰了我們對機器人的傳統理解,讓人瞬間聯想到《變形金剛》中的場景。它或許標志著機器人學進入了一個新的時代。在這個時代中,智能行為可以通過材料本身的特性直接實現,而不需要復雜的內部構造。這一發展會極大地簡化未來機器人設計,并提高其適應性和靈活性。該技術除了應用在醫療領域,也能在提升航空設備性能或改善建筑能效方面提供解決方案。長遠來看,它也是對我們思考材料、機器與智能之間關系的一種啟示。